After several intensive weeks of work, our simulator SIM83-TS01 is really starting to take shape into a complete and professional device, ready for demanding simulations. This time we focused on key components that directly affect the user experience – from the seat and steering wheel to advanced electronic solutions.
If you want to know how the construction started, you can read 1. part of the simulator build log.
Completed seat support plate
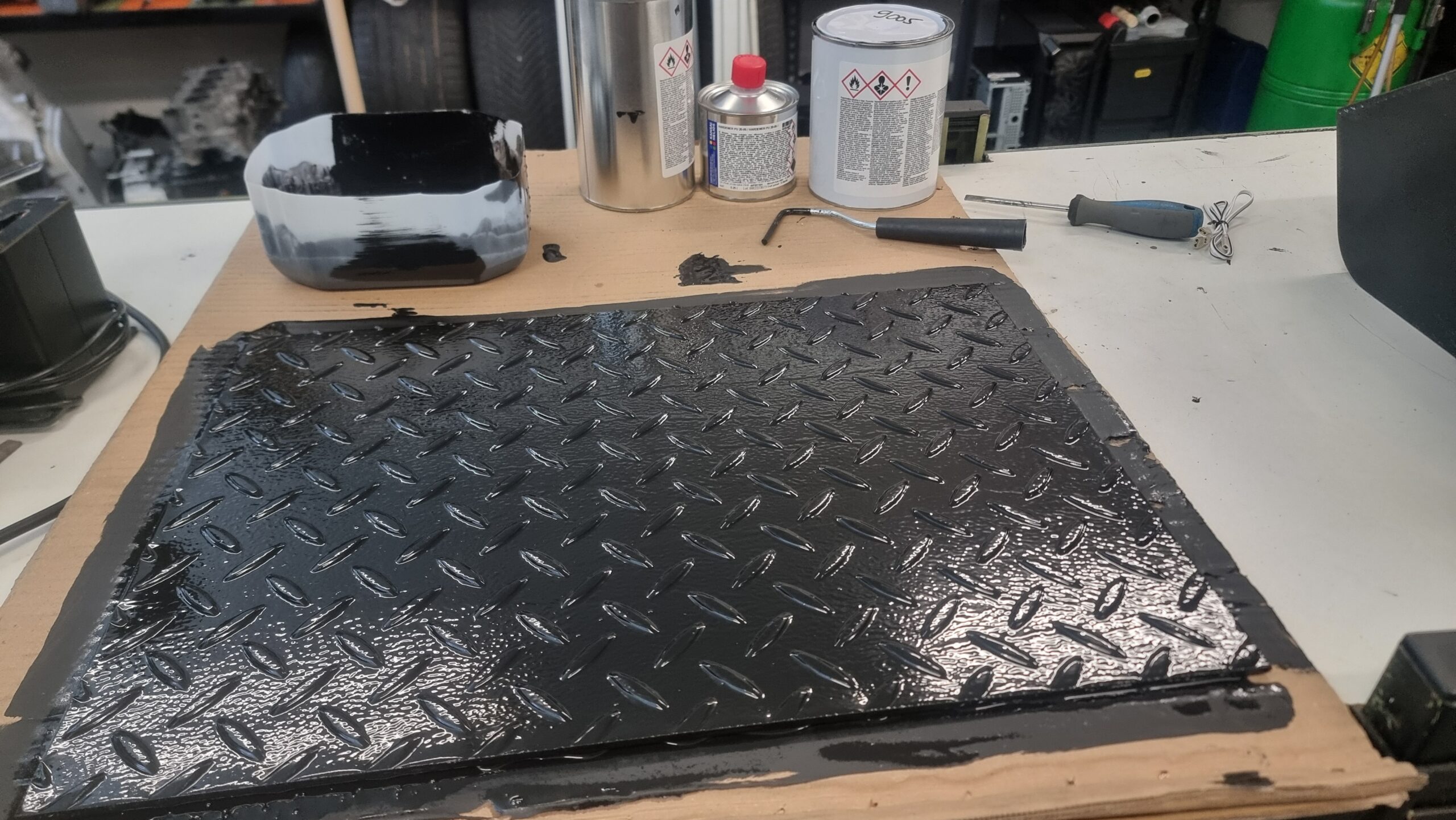
We started with the production and processing of the supporting plate for the seat, which is one of the most important structural elements of the simulator. It is a thick steel plate that must bear the entire weight of the user as well as any forces that arise during the simulation of movement, vibrations and sudden changes in direction. For this reason, we decided on durable material and precisely drawn plans that ensure optimal load-bearing capacity and compatibility with seat rails and shock absorbers.
The board was first roughly cut with a milling board, and then the edges and corners were manually processed to prevent damage during use or assembly. This was followed by drilling the exact mounting holes for the seat, cable guides and fasteners. The holes have been positioned to allow multiple configurations based on seat type and rider position – which will be key when testing different ergonomic layouts.
Finally, we coated the entire panel with a two-component industrial paint that offers high resistance to rusting, wear and mechanical damage. The paint took several hours to dry, allowing for an even and aesthetic finish with no bubbles or blemishes. The result is a solid, aesthetically pleasing and fully functional carrier unit, ready for seat assembly.



Mini Tachobox83 – a compact interface for simulators
We have also installed a completely new, improved version of our electronic interface – the mini Tachobox83, which was created in response to the needs of simulators with already built-in tachographs in the dashboard. We have developed this compact and modular interface especially for cases where there is no longer a need for an external tachograph housing, but reliable communication between the hardware and the simulation environment is crucial.
The Mini Tachobox83 takes up minimal space and can be screwed directly to the supporting structure of the simulator. Its design includes an optimized PCB circuit, an integrated USB interface for plug-and-play connection and electronic protections that enable safe use even in a more demanding environment with a lot of electromagnetic interference.
Functionally, it enables the simulation of the basic functions of a digital tachograph, such as starting the device, detecting motion, switching working hours and recording simulated data. This makes the simulator also useful for training and testing in transport companies, where knowledge of the tachograph is essential for working with category C and E vehicles.
All connections are guided by an internal scheme without exposed cables, which contributes to a clean and professional installation. The installation itself does not require additional programming – the interface is automatically detected within our software, which makes it even easier to use.
Mini Tachobox83 thus became the key link between realistic physics simulation and recreating the administrative work that truck drivers in the real world do on a daily basis.



Smart gearbox with 16 gears
One of the biggest and at the same time the most demanding innovations of this week was the modification of the gear lever, which grew from a simple mechanical component into a complex electronic device with advanced operation logic. The goal was clear – to create a system that mimics the performance of real truck transmissions as closely as possible, including the characteristic ratio between high and low gears and intermediate gear modes.
For this purpose, we completely disassembled the existing handle, removed unnecessary mechanical parts and installed a multi-input microcomputer, which enables the detection of movement in several directions and positions. We have programmed the computer to detect any physical change in the shift pattern and interpret it accordingly – either as a high or low gear range or as an intermediate position, as we know from ZF or Eaton Fuller transmissions.
The system now allows for up to 16 realistically separate gears, meaning we can simulate classic H-pattern driving, including shifting between gear ranges.



Steering wheel base and steering wheel assembly
In the final phase of this week, we assembled the steering wheel assembly, which includes the steering wheel base, the steering wheel rim and the steering wheel itself. This assembly is one of the keys to a realistic simulated driving experience, as it provides direct physical feedback to the driver and thus contributes significantly to the feeling of control over the vehicle.
We used a high-torque steering wheel base as the basis, which enables strong and precise force feedback – it can simulate everything from vibrations when driving on poor terrain to resistance when turning in sharp corners and the effects of load imbalance. The electronics inside the base are optimized to quickly refresh the signal, which ensures flawless synchronization with what is happening on the screen and the movement of the cabin.
We designed the ring and the steering wheel in a modular way. This means that by simply changing the attachments, we can also install other types of steering wheels in the future – for example, an American one with a larger diameter or a sports steering wheel for other types of vehicles. This time’s choice is a classic truck steering wheel with a robust grip and quick-change attachment system that offers exceptional stability even in intensive use.



In the sequel
In the next few days we will connect all the electronic assemblies and start testing. Next comes programming and final configuration. Our simulator is fast approaching its final form!
